안녕하세요 시란입니다.
이번 장비 소개에는 리얼센스를 가져왔습니다.
인텔사에서 만든 리얼센스 카메라입니다.
리얼센스는 키넥트와 더불어 뎁스카메라로 유명한 제품입니다.
저는 예전에도 해당 제품을 사용한 적이 있었습니다.
그래서 오히려 리뷰가 쉬울꺼같네요.
이번에 보여드릴 제품은 D435 시리즈와 L515 시리즈입니다.
먼저 D435제품입니다.
작은 직사각형 박스에 들어있습니다.

열어보면 안에 설명서와 내용물이 들어있습니다.


박스 내 구성품은 다음과 같습니다.

기본적으로 뎁스카메라와 삼각대, 그리고 USB C타입 케이블이 달려있습니다.
실제로 써본 결과 기본 제공 USB C타입 케이블은 너무 짧아서 쓰기가 불편합니다.
따라서 새로 길이가 좀 긴 USB C타입 케이블을 사용하는것을 권장드리겠습니다.
아 참고로 케이블 꽃는 곳은 측면 뚜껑을 열어야지 보입니다.

그리고 인텔 리얼센스는 자체 SDK를 지원합니다.
D시리즈 , L시리즈, T, SR 시리즈를 지원합니다.
아래 링크 들어가셔서 다운로드 받으시면 됩니다.
https://www.intelrealsense.com/sdk-2/
Developing depth sensing applications - collision avoidance, object detection, volumetric capture and more
Free cross-platform SDK for depth cameras (lidar, stereo, coded light). 10+ wrappers including ROS 2, Python, C/C++, C#, Unity and more. Try!
www.intelrealsense.com
나는 개발자가 아니라 그냥 깊이카메라를 사용해보고 싶다 하시는 분들께는 Realsense viewer를 추천드립니다.
뷰어 또한 위의 링크에서 다운로드가 가능하며, 다양하게 체험을 해볼 수 있습니다.
물론 세세한 설정 및 내 프로그램에 적용을 시키려면 SDK를 받으시면 됩니다.
https://github.com/IntelRealSense/librealsense/releases/tag/v2.50.0
Release Intel® RealSense™ SDK 2.0 (v2.50.0) · IntelRealSense/librealsense
Supported Platforms Ubuntu 16.04/18.04/20.04 LTS (1) . Kernel versions: 4.[4, 8,10,13,15], 4.16(4) , 4.18, 5.[0, 3, 4, 8]. Windows 10 (Build 15063 or later, 17763+ recommended) Windows 8.1 (2) Wi...
github.com
깃헙도 참고하시면 편하실꺼 같네요
다양한 exe파일도 있고 샘플 코드들도 있습니다.
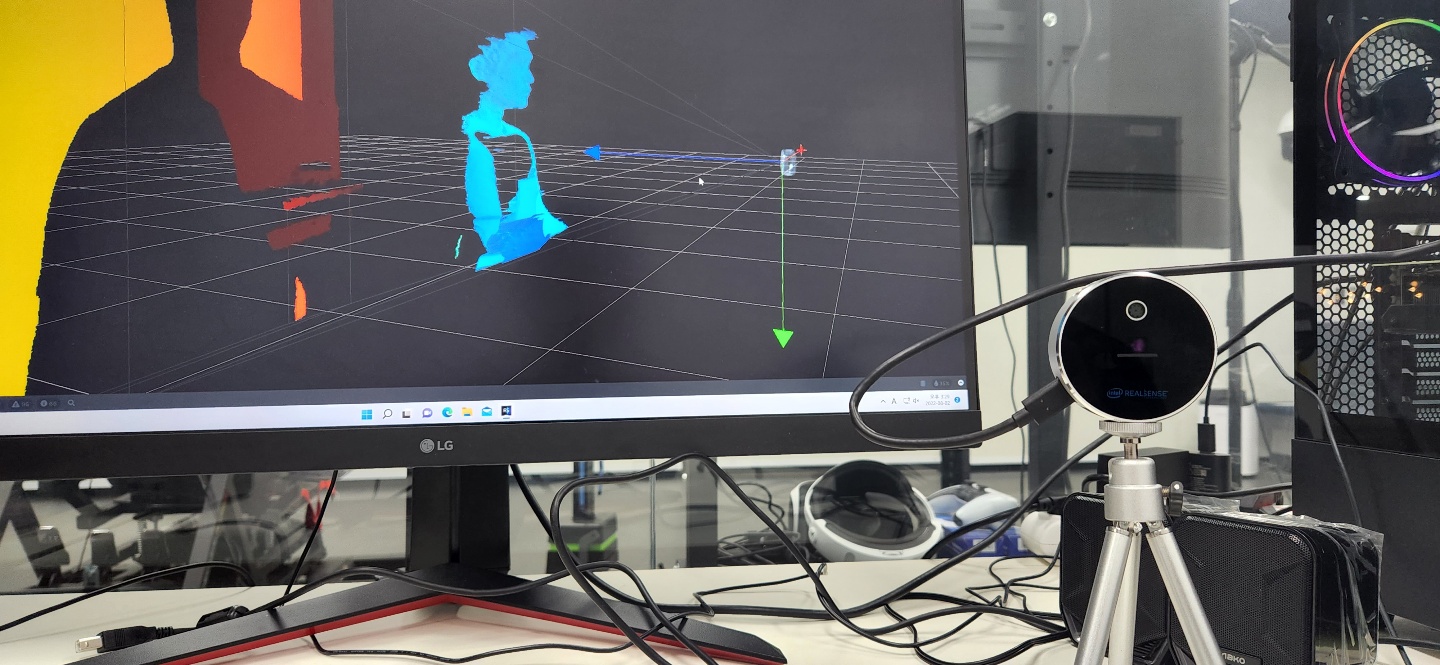
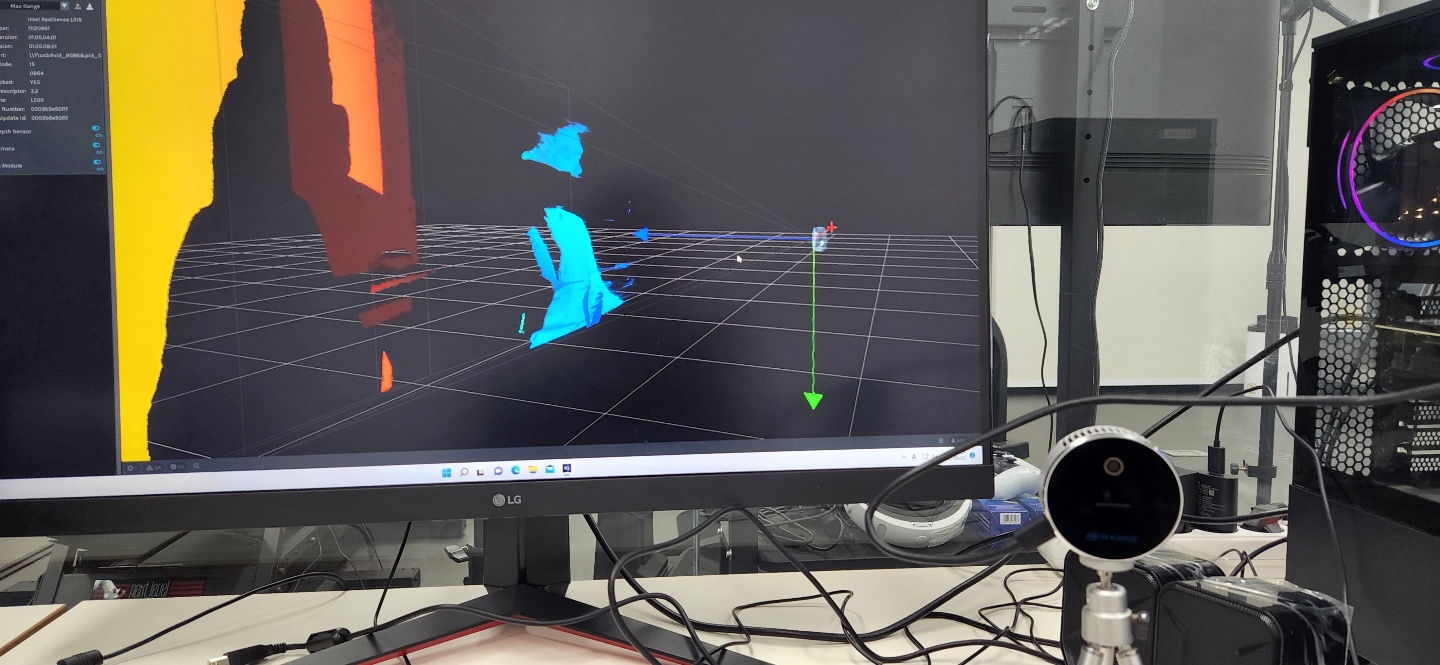
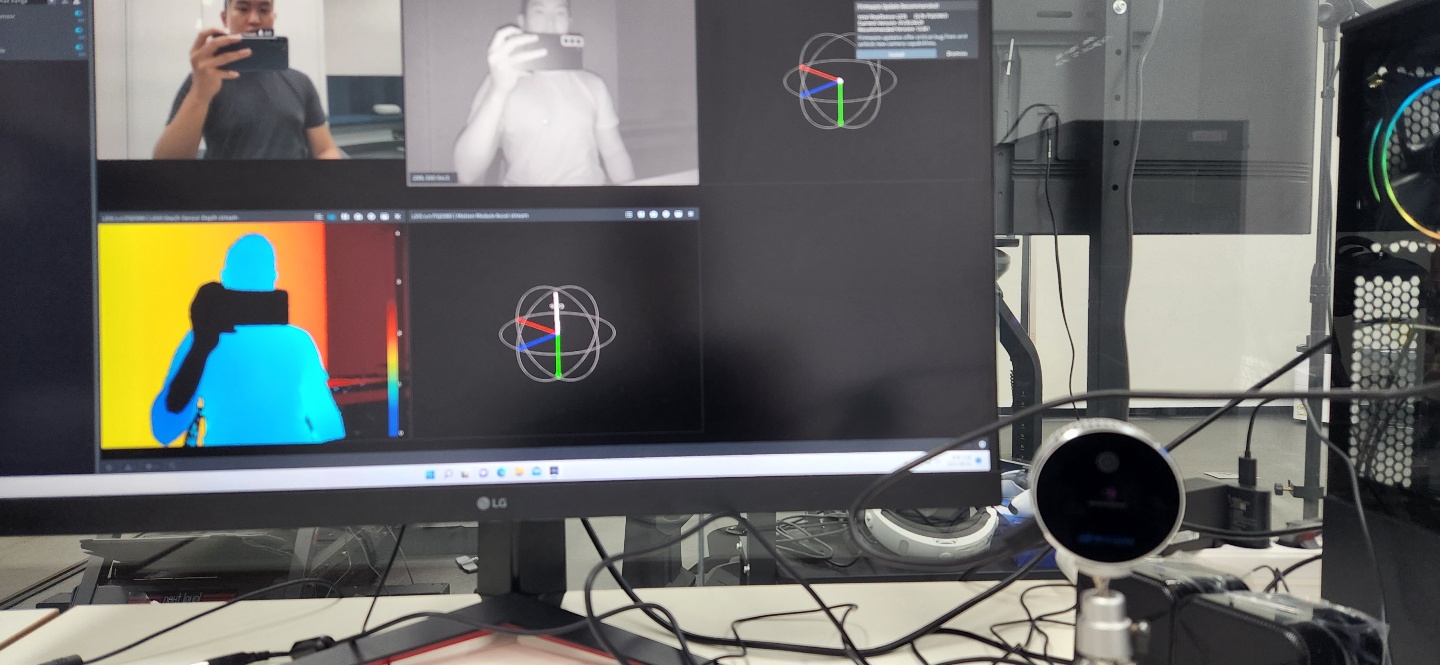
저는 보여드리기 용으로 viewer를 다운받아서 실행했습니다.


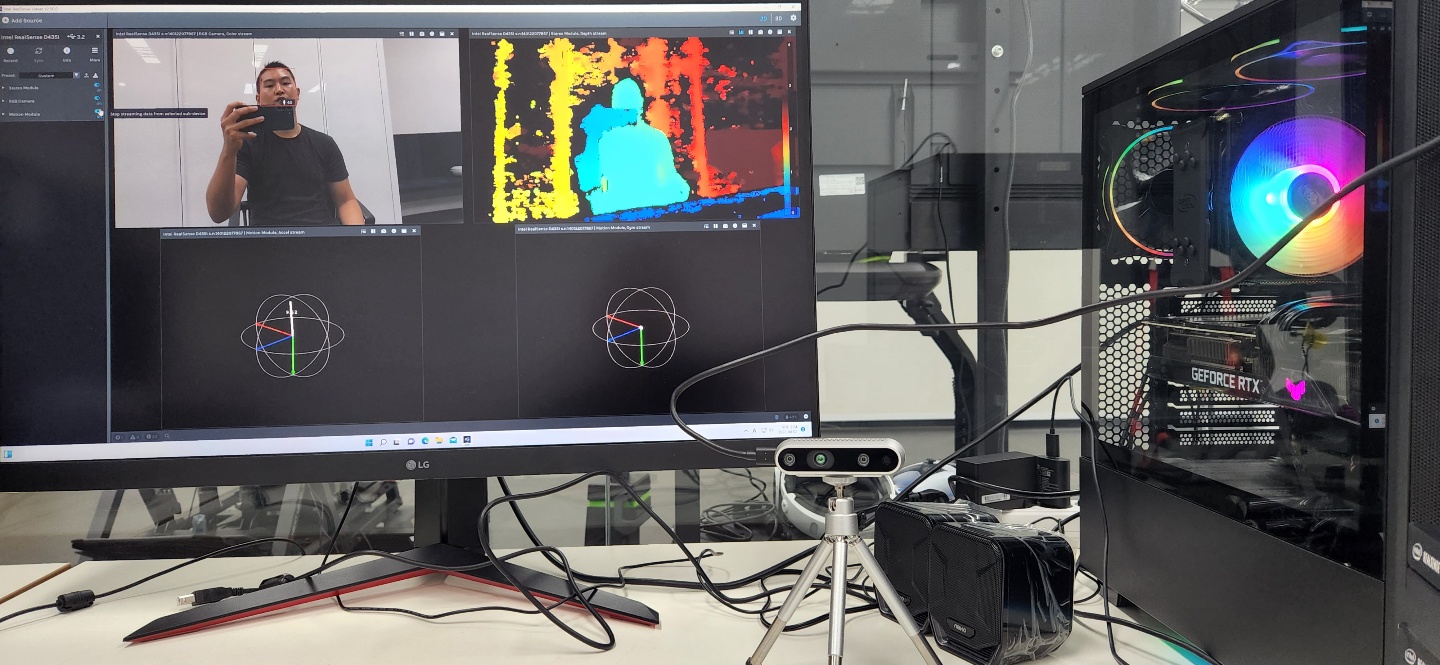
viewer에서는 Depth값을 색상을 통해서 표현을 했습니다.
그래서 카메라와의 거리가 멀수록 붉게 보이게 해놨더라고요.
그리고 viewer에서 RGB캠으로 찍은 사진을 뎁스와 합쳐서 볼수도 있고요.
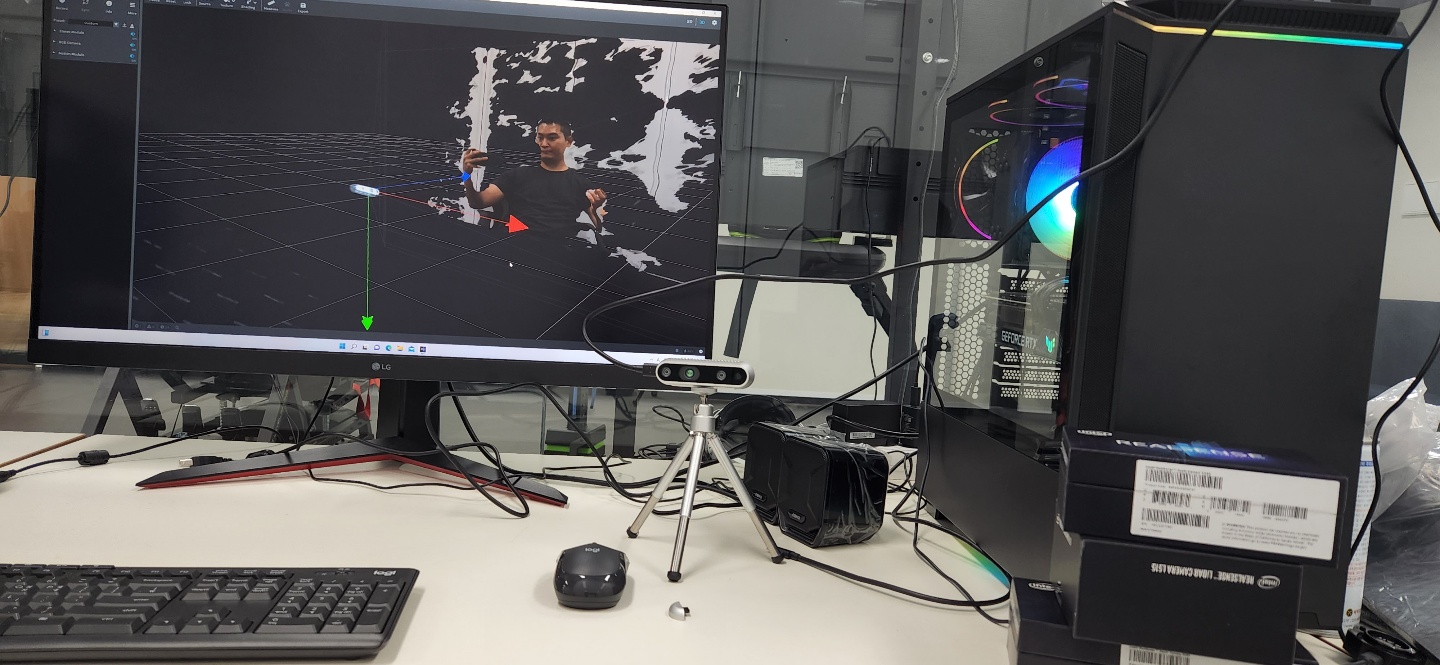
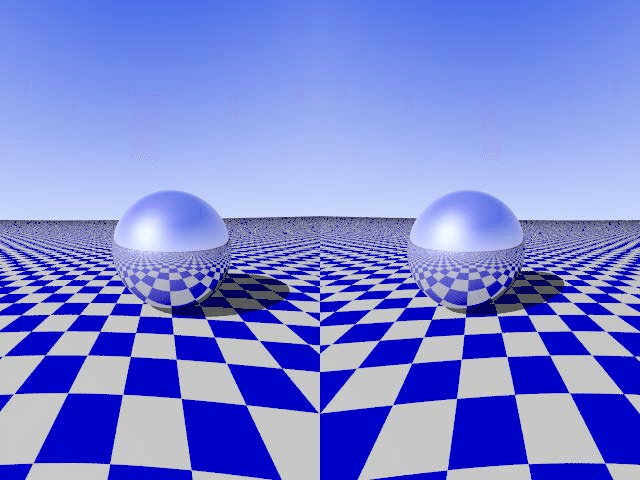
깊이 기반 카메라의 간단한 원리를 설명하자면,
일반 RGB카메라는 2D로 x, y 축만 표현합니다. 그래서 모니터에서 가로 세로 위치에 따라 표시만 하죠.
깊이기반 뎁스카메라의 경우는 z축이 추가되어 3D 깊이감을 표현합니다.
z축의 경우 카메라와 물체와의 거리를 뜻하며, 값이 커질수록 카메라에서 멀리 떨어져있다는 의미입니다.
이 x, y, z 축을 통해 3D로 물체를 표현할 수 있게 되는것이죠.
물론 카메라의 사각지대에 대한 깊이 값은 표현할 수 없습니다. 데이터가 없기 때문이죠.
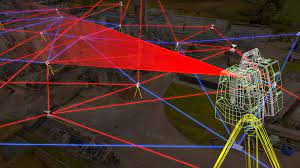
이를 위해 뎁스카메라를 여러대 붙여서 사각지대까지 커버하는 프로젝트도 있긴 합니다. ^^;;
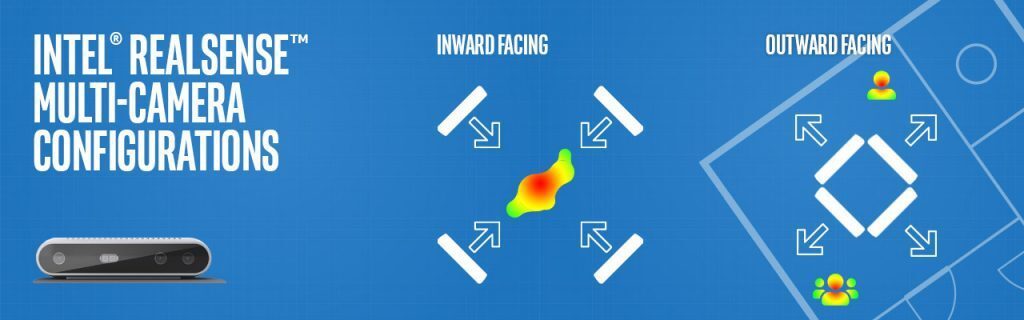
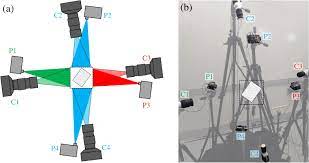
이런식으로 사용하는거죠. 그럼 사각지대의 깊이값까지 체크가 가능해집니다.
다만 이럴 경우 카메라 간의 거리 세팅을 잘 해야겠죠?
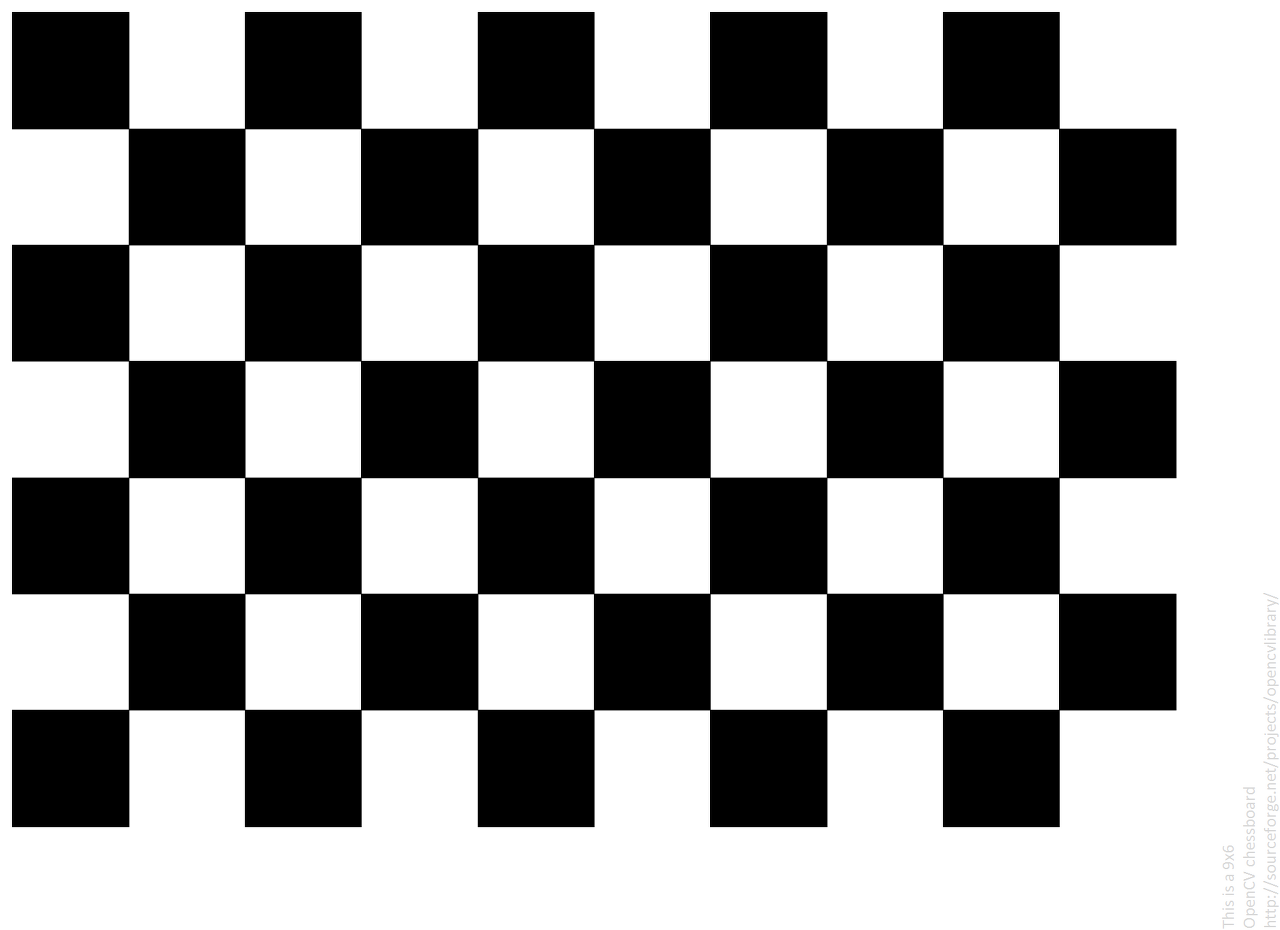
이걸 밥로 캘리브레이션이라고 합니다.

잘못된 캘리브레이션은 물체를 왜곡하게 됩니다.
캘리브레이션 방법으로는 아래 모형지를 자주 사용하죠.
여기까지 설명 드리며, 다음에 기회가 되면 좀더 설명하는 시간을 갖도록 하겠습니다.
다음은 L515시리즈를 열어보도록 하겠습니다.
L515는 동그랗게 생겼네요 .



모양이 D시리즈보다는 더 안정적인거 같기도 하네요.

그리고 세울때 모습입니다.
역시나... USB C타입 케이블이 짧아서 불편하더라고요.

역시 Laser방식이라 그런지 D시리즈와는 다르게 적외선 영상도 있더라고요
D시리즈와 L시리즈의 차이점이라면
깊이를 측정할때의 방식 차이입니다.
D시리즈는 StreoScopy 방식을 사용합니다.
양안 시차 방식을 이용해서 깊이감을 측정한다는 의미입니다 .
양쪽의 위치와 왜곡 정도의 차이점을 통해 깊이를 측정하는 방식입니다.
그런 반면 L시리즈는 Laser scanning방식을 사용합니다.
둘다 사용해 봤을때 엄청나게 큰 차이점은 잘 모르겠더라고요.
요즘은 워낙 카메라들이 잘 나와서 그렇죠
다만, 예상컨데 레이저방식의 경우 야외찰영 용도는 적합하지 않을것입니다.
태양광에 의해서 많이 측정하기 힘들어질꺼에요.
다만 실내에서는 레이저 방식이 좀더 깔끔하게 찍히겠죠?
그럼 지금까지 리얼센스 카메라 시리즈 리뷰 및 간단한 원리에 대해서 알아보았습니다.
다음번에도 재밌는 장비들과 이론들로 찾아뵙겠습니다.
긴글 읽어주셔서 감사합니다.
'IT 관련 지식 > 메타버스 장비 소개' 카테고리의 다른 글
| Next Level GT Track +Trackion PLUS Platform 소개 및 게임과 연결 방법 안내 (0) | 2022.11.25 |
|---|---|
| [실감미디어사업단] 대학 진로탐색 캠프 가상현실 / 메타버스 체험 진행 (0) | 2022.09.05 |
| 오큘러스 - 가상현실 체험 가능한 메타버스 대표적 장비 (0) | 2022.07.09 |
| 메타버스 4가지 유형과 사례 (0) | 2022.07.07 |
| M1 MAX mac studio, 가벼우면서 충분한 성능 그래픽 작업용 최적 (0) | 2022.07.07 |



